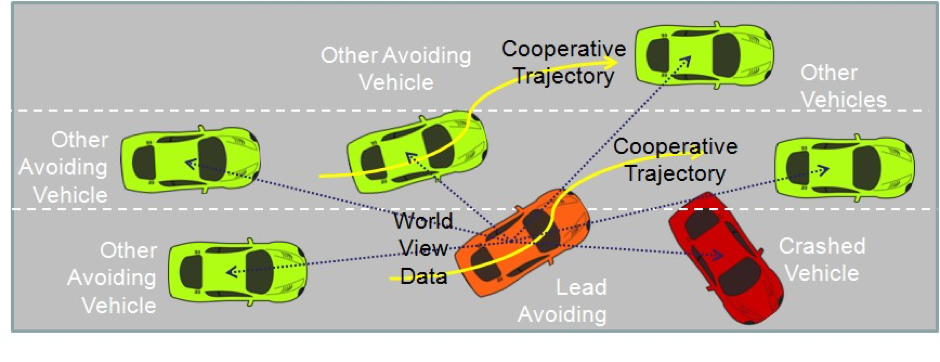
A pioneering project has developed technology that could radically reduce the number of multi-vehicle collisions on motorways. The Multi-Car Collision Avoidance (MuCCA) research and development project, has used artificial intelligence (AI) and vehicle-to-vehicle (V2V) communications to instruct autonomous vehicles to cooperatively make decisions to avoid potential incidents.
The project, funded by Innovate UK and the Centre for Connected and Autonomous Vehicles (CCAV), and delivered by a consortium led by Applus IDIADA with Cranfield University, Westfield Sports Cars, Cosworth, SBD Automotive and Connected Places Catapult, has seen MuCCA equipped vehicles successfully complete replicas of real-life UK motorway scenarios on test tracks. When the technology in the vehicles detects an incident, the cars share information by radio links, and the on-board computers calculate the best manoeuvres to avoid the obstacles and then safely steer the agreed path to avoid an accident. The MuCCA equipped vehicles also avoid each other and remove the need to brake suddenly – which may have caused vehicles behind to drive into them.
Connected and autonomous vehicles (CAVs) are expected to become increasingly common on our roads within the next 10 years, there will however be many non-autonomous ‘human driven’ vehicles that will remain for the foreseeable future. In this near future scenario, MuCCA equipped vehicles could take on the added complexity of anticipating the likely behaviour of any human drivers in the vicinity of an incident.
Although the UK has some of the safest roads in the world, around 4,500 accidents still happen on UK motorways each year, contributing to 1,700 annual deaths and over 22,000 serious injuries[1]. Incidents on the motorway network also cause delays and congestions which can have a serious economic impact on UK businesses, costing around £8 billion a year according to estimates. MuCCA technology has the potential to significantly reduce these.
Rachel Maclean MP, Minister of Transport, Department of Transport said: “The potential of self-driving vehicle technology is unprecedented and could help to level up transport across the nation by making every day journeys greener, safer, more flexible and more reliable.
The MuCCA project is yet further proof of the UK leading the way in the safe and secure development of self-driving vehicle technology.”
Charlie Wartnaby, Technical Lead, Applus IDIADA UK said: The MuCCA project has delivered a world first, achieving collective collision avoidance behaviour between real cars, in a clear demonstration of fully automated cooperative control mediated by vehicle-to-vehicle radio. Combining connectivity and automated driving like this has applications beyond the valuable emergency role proven here to more general cooperative vehicle movement, promising enhanced safety and efficiency on our roads in future. This places the UK at the commercial forefront of driving technology that will benefit all of society.
Find out how we got on with our final demonstration here
Note to Editors
Cost of congestion to the UK can be found in the Inrix Traffic core card:
https://inrix.com/press-releases/scorecard-2018-uk/
[1] DfT Annual Report 2018
Additional Quotes from MuCCA Consortium
Guillermo Tejera, Lead Project Manager and Senior Engineer, Applus IDIADA said:
“From concept definition to the final trials and demonstrations, the MuCCA project has successfully combined the joint effort of an outstanding consortium to develop a next-generation driver aid. After two and a half years of development and testing, a genuine concept that integrates the latest technologies has proven the principle of reducing car accidents using automated and leaderless cooperation between vehicles.”
Nicola Yates OBE, Connected Places Catapult CEO said:
“The MuCCA project has realised one of the most talked about aspects of connected and automated vehicle technology, safety. Connected Places Catapult is proud to have used our extensive experience with autonomous technology, to support the world leading consortium incorporating large organisations, SMEs and academia, to develop a ground-breaking system and establish the UK as a global leader of vehicle-to-vehicle connected safety solutions.”
Ross Walker, Research Fellow/Engineer in Autonomous Cars in the Signals and Autonomy Group in the Centre for Electronic Warfare Information and Cyber at Cranfield University, said:
“The scope of MuCCA is vital for safe future transportation systems and so we’re thrilled to be part of the project. The University is a pioneer in connected and autonomous vehicle engineering, and we were able to develop computer algorithms that help the cars to react in a more human-like way when avoiding collisions. This can allow any potential accidents to be recognised in advance, and consequently avoided before they have chance to begin developing.”
Icaro Bezerra-Viana, Research Fellow in Autonomous Cars in the Signals and Autonomy Group in the Centre for Electronic Warfare Information and Cyber at Cranfield University, said:
“Computer simulations enabled us to model how human drivers behave on motorways, and how the proximity of surrounding cars influences their behaviour. The movement of the cars that surround a vehicle over the next few seconds can then be predicted in order to avoid a collision. Being part of the MuCCA consortium and working with partners has enabled us to learn more technically and work together to find the most appropriate solutions.”
Tom Buckler, Managing Director, Cosworth Electronics said:
“We are proud to be a partner in the pioneering MuCCA project, which has provided the opportunity for Cosworth to extend our advanced electronics and data analytics technologies into the LiDAR and machine vision systems space for autonomous vehicles. It is great to see how the project has come together to lay out the roadmap for the future of mobility.”
Julian Turner, CEO, Westfield Sports Cars said:
‘The MuCCA project provides a unique perspective into the importance of emerging technologies, such as vehicle to vehicle communication, role in the future of Connected Autonomous Vehicles motorway deployments.’’
Luigi Bisbiglia, Business Development Manager, SBD Automotive said:
“In a project like MuCCA, it is important to think about the cyber threats. For example, how to prevent malicious spoofing interfering with vehicle controls, whilst allowing genuine co-operating “stranger” vehicles to influence control. SBD identified the “bad actors” who may have an interest in attacking V2X systems, and the elements of the system they might try to attack, allowing us to propose a number of cyber security features that will make the system more secure. As experts in connected and autonomous vehicles, our involvement in MuCCA allows us to further differentiate our services from the mass market of generic pen testing companies.
Consortium Partners Overview & Communications Contact
Media Enquiries
Stephen Lynn
Connected Places Catapult
Stephen.Lynn@cp.catapult.org.uk
+44 7496 437907
Natasha Moore
Connected Places Catapult
Natasha.moore@cp.catapult.org.uk
+44 7741 165015
About Applus+ IDIADA
Applus IDIADA is a global partner to the automotive industry with over 30 years’ experience supporting its clients in product development activities by providing design, engineering, testing and homologation services. IDIADA’s success in product development is built on a unique blend of highly experienced engineers, state-of-the-art test and development facilities and the constant drive towards innovation. The company has more than 2.750 professionals and an international network of subsidiaries and branch offices in 24 countries, ensuring its clients receive customized added-value solutions.
About Cranfield University
Cranfield is a specialist postgraduate university that is a global leader for education and transformational research in technology and management. Cranfield has over 60 years’ experience in transport, including the aviation, automotive, motorsport, military and marine sectors. Our Multi-User Environment for Autonomous Vehicle Innovation is a £9 million ‘smart’ roadway test environment for the development of intelligent and autonomous vehicles, the first of its kind in the UK next to an airport and within the controlled setting of a university campus. It includes the associated systems needed to integrate emerging technologies into our day-to-day lives. Cranfield University is working at the forefront of research and teaching in motorsport, automotive engineering and mechatronics. Courses include the Automotive Mechatronics MSc, the Automotive Engineering MSc, and the new Connected and Autonomous Vehicle Engineering (Automotive) MSc. https://www.cranfield.ac.uk/themes/transport-systems/courses
www.cranfield.ac.uk/transportsystems
@CranfieldUni
About Connected Places Catapult
The Connected Places Catapult accelerates smarter living and travelling in and between the places of tomorrow. We focus on growing businesses with innovations in mobility services and the built environment that enable new levels of physical, digital and social connectedness. The Connected Places Catapult operates at the intersection between public and private sectors and between local government and transport authorities. We convene the disparate parts of the market to help innovators navigate the complexity of doing business, creating new commercial opportunities and improving productivity, socio-economic and environmental benefits for places. Visit cp.catapult.org.uk for more information.
About Cosworth
Cosworth has used the rigours of motorsport to transform itself into a growing and profitable Tier 1 supplier to automotive manufacturers. The company’s unparalleled capabilities in powertrain and performance electronics have been honed from six decades at the very pinnacle of automotive engineering. In response to the significant advances in the automotive and motorsport landscape, Cosworth has always sought to develop technologies to meet ever-evolving demands from its customers. Whether it is through propulsion, hybridisation, connectivity or automation technology, Cosworth is ready to solve the new challenges on the road, racetrack and in the air with the mobility solutions of the future.
About SBD Automotive
SBD Automotive is a global consultancy firm specialising in automotive technologies. For over 20 years, our independent research, insight, and consultancy has been helping vehicle manufacturers and their partners to create smarter, more secure, better connected, and increasingly autonomous cars. Having built a reputation for robust data and expert advice, as well as an ability to attract and retain the industry’s most talented specialists, SBD Automotive recently received the Queen’s Award for Enterprise – a much-coveted award for outstanding achievement by UK companies. If you would like to learn more, please visit www.sbdautomotive.com
About Westfield
Westfield Technology Group is the UK’s leading autonomous vehicle provider. Globally we are known for our niche sports cars with over 20,000 sold worldwide. Westfield were the first niche vehicle company in the UK to obtain European Small Series Type Approval for its vehicles, processes and premises. The Westfield POD is the UK’s first fully autonomous vehicle for first mile – last mile transportation. The POD has been developed in conjunction with Heathrow Airport and utilises the base technology platform from the work completed by ULTra PRT (Personal Rapid Transit).
About CCAV
The Centre for Connected and Autonomous Vehicles is a joint BEIS and DfT unit that seeks to keep the UK at the forefront of the development and deployment of connected and self-driving vehicles through policy development, regulatory reform and joint investment with industry into R&D and testing facilities.
About Innovate UK
Innovate UK is part of UK Research and Innovation, a non-departmental public body funded by a grant-in-aid from the UK government