Is MuCCA leading the pack for collaborative, collision avoiding technology?
By Stuart Rowell, Principal Technologist, Connected Places Catapult
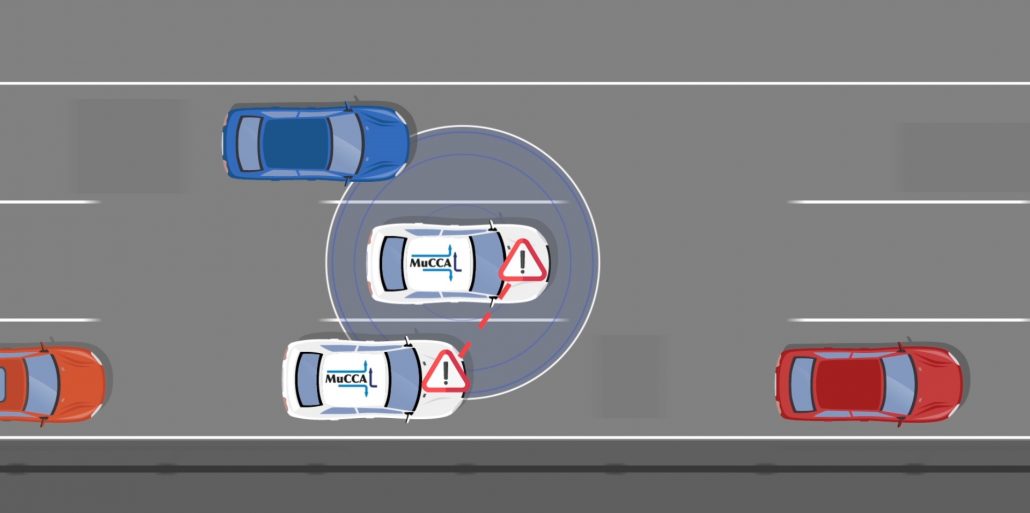
The MuCCA (Multi-Car Collision Avoidance) project has a grand aim; using connectivity and autonomy to avoid (or minimise) damage in high speed, multi-vehicle traffic accidents. Our MuCCA-equipped cars will be able to sense danger, communicate that danger amongst themselves, collectively decide on a best course of action, take control of the vehicle, and then safely hand back to the driver at the appropriate time. Best of all, this technology will recognise all vehicles, not just those MuCCA-equipped, and so supporting the gradual roll-out of connected and autonomous vehicles (CAVs).
We are developing this next-generation driver aid through collaboration with world-leading industry partners. We are using advanced artificial intelligence, vehicle-to-vehicle (V2V) communications and sensor fusion to take a significant evolutionary step in automated vehicle development. But we’re not alone in looking into advanced driver aid connectivity and autonomy. With Toyota announcing their ‘Guardian’ system at CES 2019, let’s consider where MuCCA sits in the global race to deploy safe, reliable CAVs onto public roads.
What makes MuCCA different?
Tesla’s Autopilot system and notable German manufacturers (Mercedes’ Driving Assistance Plus, Audi’s Traffic Jam Pilot) are carrying out some exciting work when it comes to developing advanced driver assistance systems (ADAS). Other manufacturers (for example Nissan and Jaguar Land Rover) are developing similar technologies – looking at anticipation, collision-avoidance control and vehicle-to-vehicle communication. But we believe MuCCA is the only collaborative project with the ambition of bringing all of these elements together into one system.
So what specific capabilities will MuCCA be developing?
- Anticipation of the trajectories of other vehicles ahead, alongside and behind the primary vehicle
- Communication with other MuCCA-equipped vehicles to communicate possible collision hazards and to receive information from other vehicles further ahead
- Planning of a coordinated swarm-like response for all vehicles to best avoid the hazard
- Execution of the necessary emergency collision-avoidance control decisions (braking, acceleration and steering)
MuCCA is addressing the immediate, close proximity emergency – it will not rely on previous highway or sat nav information to be alerted to potential hazards but will be responding to real-world, high-speed incidents on our fastest roads. And once the best course of action is decided by the MuCCA system, it will brake, accelerate and steer the vehicle to protect the passengers and other road users.
Evasive steering systems
When it comes to the moment of engagement – when the MuCCA system through V2V communication has determined collectively or singly that action needs to be taken – evasive steering will automatically kick-in. This is the real test of the MuCCA system.
Current evasive steering systems in the market are designed to assist the driver in performing an emergency lane change or swerve manoeuvre, but crucially only once the driver has applied aggressive steering inputs. They are designed to provide powered steering support to both help the driver to apply emergency steering, and to ensure that vehicle stability is maintained during the manoeuvre.
Mercedes and Ford have Evasive Steering Assist technology, but there is no sharing of information or location details, manoeuvre coordination or decision making by the vehicle prior to providing assisted steering – here MuCCA stands alone.
Suppliers like ZF Group are currently testing Automatic Emergency Steering technology but as far as we know this type of system is not currently close to production. What’s more, this type of system only performs on-board sensor-based detection – there is no connected element, either to infrastructure or between vehicles.
What makes MuCCA unique is its V2V communication and manoeuvre coordination between the vehicles once a hazard is detected. Most systems currently only perform longitudinal or lateral intervention, or some combination of both under the driver’s supervision, but none of the ADAS systems we know come close to what the MuCCA system is attempting in terms of functionality and complexity.
One final attribute is how the MuCCA-equipped vehicles will anticipate human drivers, thus function better than a human would in an overwhelmingly human environment. Cranfield University have been working on a neural network algorithm that helps a MuCCA vehicle predicts human driver behaviour – how they would react and behave to avoid a collision.
Additionally, a human may not have the quickest reaction times and there is room for fault in a situation like this – the MuCCA system has a better view of the world and is able to make more informed decisions helped by sensors to detect the position and movement of all surrounding cars. Additionally, by predicting how other drivers will behave, this allows MuCCA-equipped vehicles to avoid potential accidents as they are recognised in advance.
MuCCA deployment
Pretty ambitious stuff and as can be seen we’re exploring unchartered territories. But it should be remembered that MuCCA is a collaborative R&D project, and it is not within the scope of the project to test or release this technology into the public realm. Later this year as the project concludes we’ll be holding trials on a closed circuit, using real vehicles at high speeds to demonstrate the effectiveness and potential impact of this new system. Exciting times!
What comes next? Watch this space, but we soon hope that MuCCA can become an additional safety option for drivers when they are purchasing their vehicles, helping to make our roads safer and drives more comfortable.
###
MuCCA is Research & Development project funded by CCAV (Centre for Connected & Autonomous Vehicles) and Innovate UK being delivered by a consortium consisting of AppIus IDIADA, Cosworth, Cranfield University, Westfield Sportscars, Secured By Design and the Connected Places Catapult. Keep up to date with the latest news on twitter @muccaproject