Decision making algorithms
MuCCA cooperative path-planning/decision making algorithms and its applications on motorways
Are we ready for autonomous driving? How autonomous driving can assist humans on the motorways? These issues are recurrent nowadays in the face of the biggest challenges that are appearing to building safety systems on our roads. Autonomous driving systems can help decrease fatalities caused by traffic accidents. However, this technology has a good deal of aspects to be improved so as planning obstacle-free paths for a vehicle to increase highway safety.
A challenging research task for autonomous driving is the coordination of several autonomous cars. This new technology is the guarantee of making car traffic safer in the future. Cooperative systems have just recently started to be explored in the context of automated driving and are expected to become increasingly common on motorways. In this context, the MuCCA (Multi-Car Collision Avoidance) project, funded by the Centre for Connected and Autonomous Vehicles (CCAV) via Innovate UK, is developing a cooperative system that will enable connected and autonomous vehicles (CAVs) to avoid collisions. As part of this project, Cranfield University is responsible for developing robust algorithms for path prediction and decision-making/inter-vehicle communication.
The actual version of the algorithms developed considered a strategy based on model predictive control (MPC) to make cooperative decisions to avoid a potential accident. We explored an extending cooperative path-planning approach to traffic where human drivers are present in on-road scenarios. In the not-too-distant future, it is feasible that cooperative solutions to driving manoeuvres that would enable autonomous vehicles to simultaneously coexist on the roads with vehicles driven by humans. In this context, the human driver model (HDM) needs to be integrated with the autonomous planning in order to safely interact with the autonomous vehicles on the road.
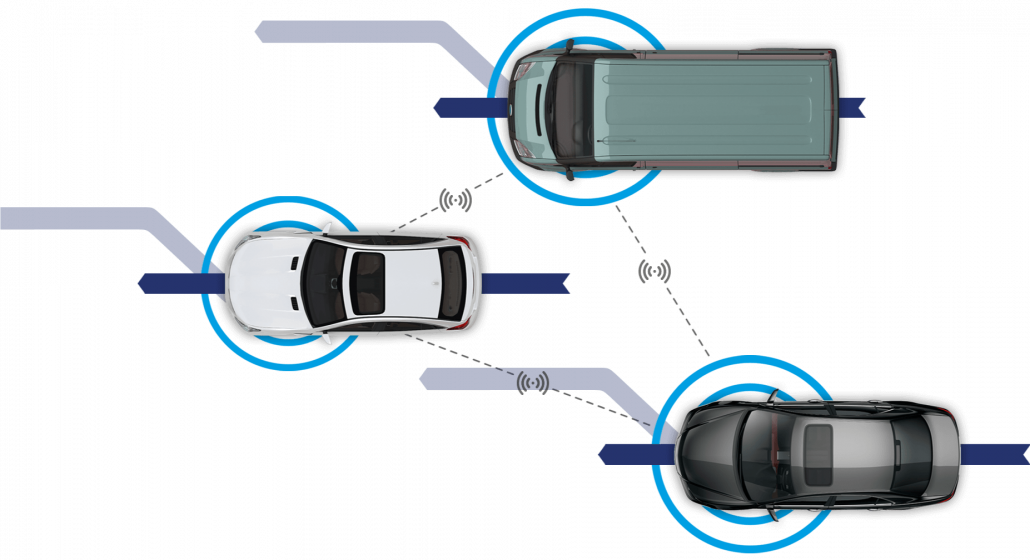
Our cooperative planning framework re-plans the route of the vehicle for each step and can be summarized in Figure 1. This solution is able to provide the following improvements and capabilities:
- Incorporation of constraints for smoother manoeuvring when avoiding obstacle. System constraints are the set of rules to drive on roads, road boundaries and logical propositions that guarantee a safe distance to other MuCCA vehicles and obstacles.
- Increased prediction horizon for path planning and more short horizon for trajectory control in order to get better predictions and precise vehicle control.
- Demonstrates V2V communications to avoid collisions. The plans of other vehicles can be communicated in real time so that each vehicle communicates its desired location.
- Able to demonstrate path planner at higher speeds and varying vehicle speeds.
- Incorporation of multiple human driven vehicles into path planning process. Considers multiple human driver path predictions from either the neural network model or the ANFIS (artificial neuro- fuzzy inference system) model for the HDM.

Figure 1. The basic concept of cooperative path-planning as a model-based and optimization-based solution.
The first conclusions were promising since our system was able to successfully avoid human driven vehicles along with obstacle and other MuCCA vehicles. The results of this first investigation for the cooperative path planning and decision making algorithms developed by Cranfield will be presented at the 9th International Conference on Intelligent Systems (IS’18), an international event supported by IEEE. This conference will be held in Madeira Island, Portugal, on 25-27 September 2018.
Dr Icaro Viana, Research Fellow in Autonomous Cars: Cooperative Guidance, Cranfield University.